During my master’s degree I did extensive work with motion capture (primarily Optitrack, some Vicon). For this project we used a Baxter robot (not the best choice of robot if you are trying to do precise things, I know) and a Vicon motion capture system. We placed three markers on the end effector of the robot (the end of it’s arm) and commanded the robot to move each joint individually. We recorded the joint commands and the position of the three markers synchronously for later use in the system identification algorithms I wrote.
Estimating Kinematic Parameters with No Prior Knowledge
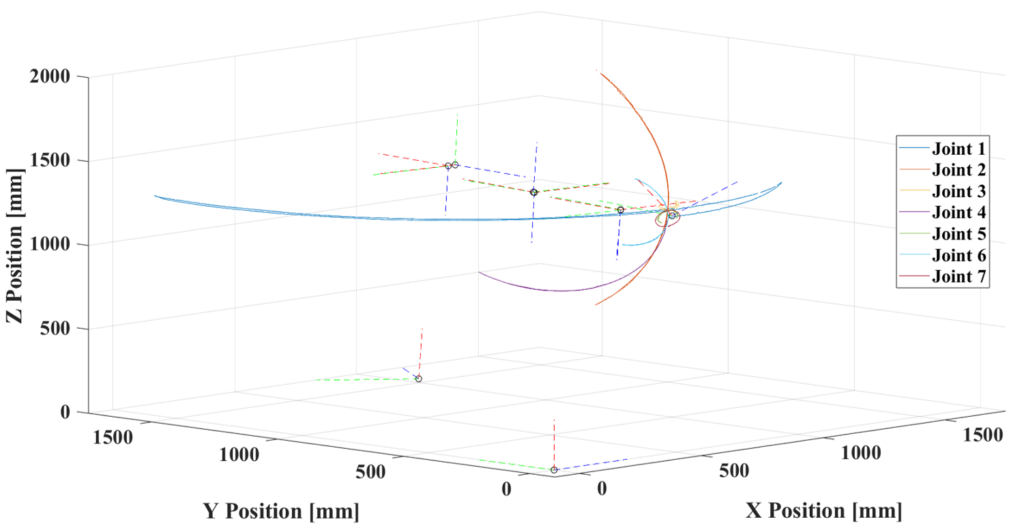
Once the joint angles had been commanded and the markers had been tracked, techniques like circle point analysis were used to recreate a kinematic model of the Baxter’s DH parameters in MATLAB. The solid lines show the position of the markers moving through space as each joint moved and the dashed lines show the estimated coordinate frames for each joint in the robot manipulator.
Improving Parameter Estimates
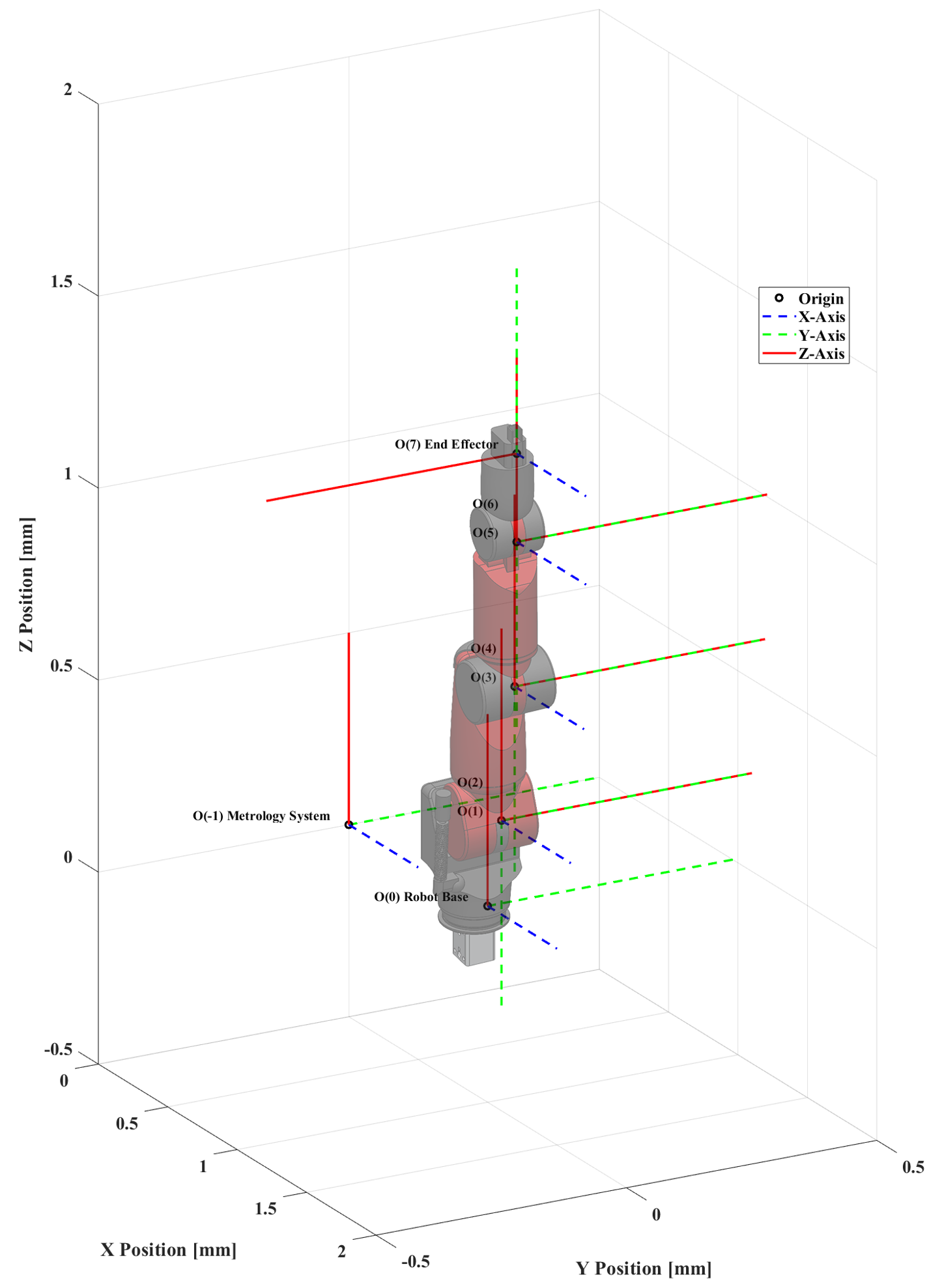
Improvements to these parameter estimates could be made using techniques like parameter elimination where kinematic parameters such as gear ratios without enough information to be estimated could be eliminated or combined with other parameters like encoder resolutions for more accurate estimation. The results were kinematic models of Baxter with much more accurate parameter estimates enabling more precise positioning of the end effector.