

The Three-Armed Medic
In emergencies, an extra hand can mean the difference between life and death for a patient. The three-armed medic is an autonomous assistant that provides an extra hand for first responders, listening to their requests and then passing them tools so that they can keep their focus on treating the patient.
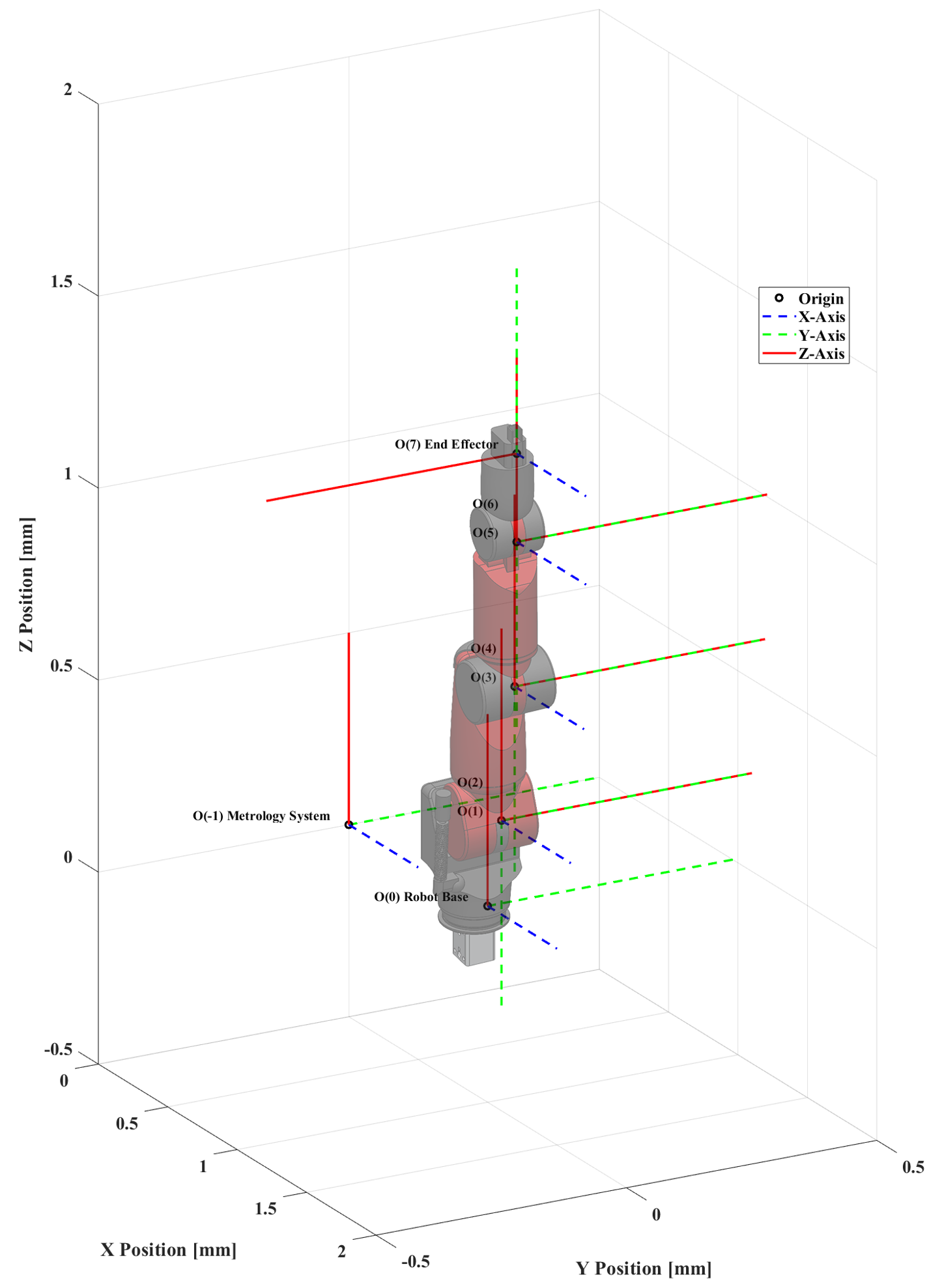
Robot Manipulator System Identification
Precise positioning of an end effector is extremely important for small, delicate tasks. The kinematic parameters of a robot manipulator can be difficult to measure with the precision required to achieve this level of control over robot pose, especially in open-loop systems where the robot has no external way to measure its pose, precise positioning and orientation can become impossible. System identification using motion capture allows more precise estimates of robot parameters to be obtained. I wrote several different algorithms that could do a variety of system identification tasks using motion capture data, from improving the accuracy of measured kinematic parameters to generating sets of kinematic parameters using only motion capture data and knowledge about the number of joints in the manipulator.
Utah Open-Source Bionic Leg
For transfemoral amputees (people with a leg amputated above the knee) activities like walking up stairs or transitioning from sitting to standing can be extremely difficult, sometimes impossible. These motions require adding energy to combat the force of gravity and for transfemoral amputees, the muscles in the residual limb are no longer able to perform that function. Active prosthetics (i.e., prosthetic limbs with motors in place of muscles) can solve this problem. In an effort to make this technology more accessible I helped design and program the electrical systems for the first version of an open-source active prosthetic leg built using off-the-shelf and 3D printed parts.

BYU Mars Rover Team
Imagine traveling across a Martian desert. Most people will never get the opportunity but traversing a desert in southern Utah can be a close second. For my undergrad senior project, I designed and manufactured parts for the BYU Mars rover's chassis, drivetrain, and robotic arm. We competed at the University Rover Competition in southern Utah where we placed 9th out of 30+ teams from schools around the world (only our world though, no actual Martians chose to enter the competition).

GenNext Robotic Hand
This is not a true robotic hand as it is not actuated, but it was a design project that I enjoyed none the less! The challenge was to design "the next thing" (i.e., the next version of a product). I chose to design the next version of a robotic hand, taking my inspiration from the movie Chappie which had recently come out at the time I was working on this. It was a great exercise in surface modeling, using design tables to create different versions of a part, and making product renders.

Wayfarer Drone
This drone was designed to be light weight and compact. Inspired by the easy to stow shape of a Nalgene water bottle, we created a foldable drone that we could use to explore the world. Like the GenNext Robotic Hand, this design never made it out of the computer renders, but maybe one day I will revisit it and make a prototpye. As it is, this was a great exercise in working with a team to create a complex set of part and assembly drawings.
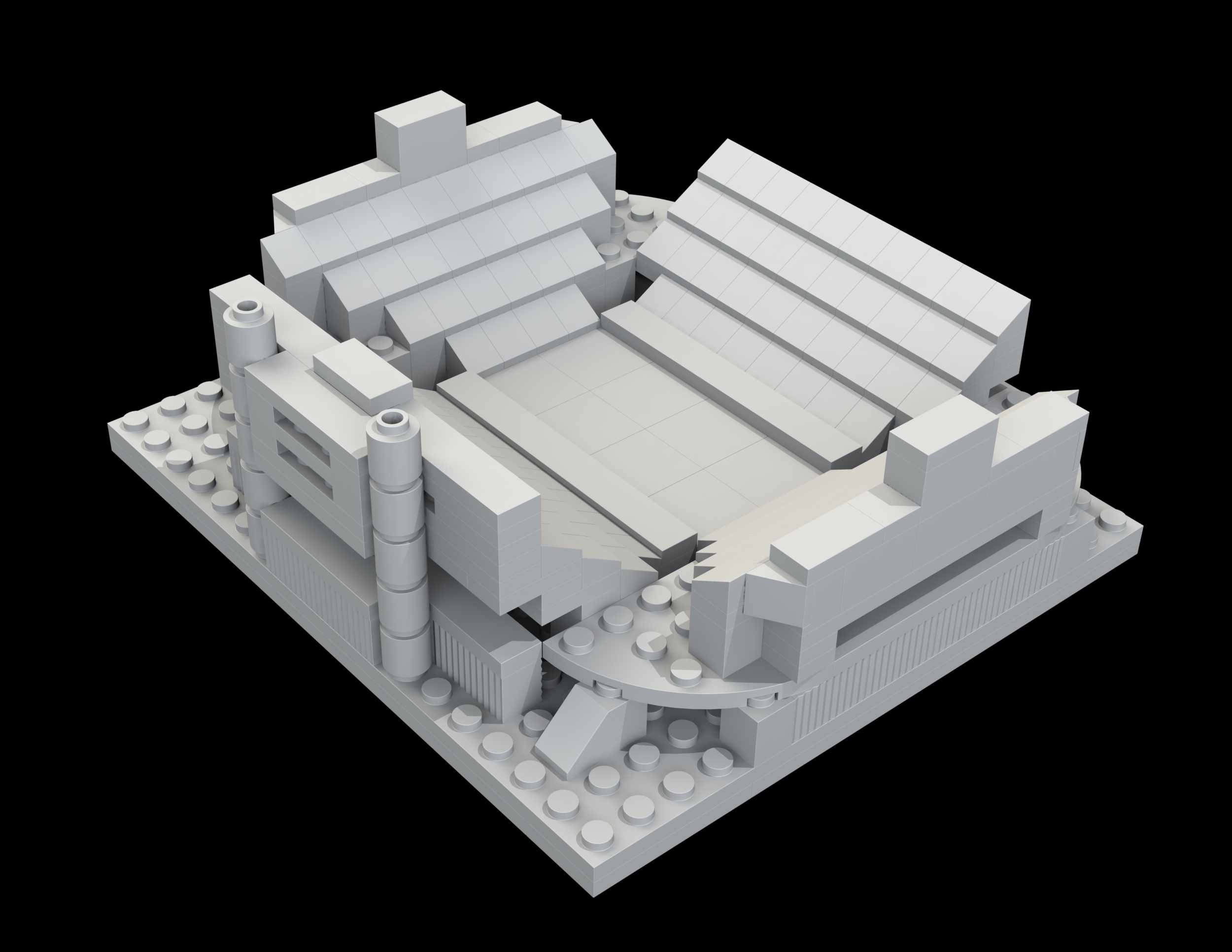
LEGO Football Stadium
Who doesn't love to play with LEGO?!? Turns out LEGOs are a lot less fun when you are creating them using design tables in SolidWorks and then assembling them using the mate commands (you need three mates to constrain all the degrees of freedom of a brick and there were 343 bricks in this build...that's a lot of mates). The end result is very cool though, a model of BYU's Lavell Edwards Stadium that could be sold for a pretty penny as a LEGO Architecture set.
Other CAD Projects
These are other smaller CAD projects that don't get their own pages, but I still think they are interesting and I am proud of them. Include on this page are teh MAGLITE flashlite, an inductive wireless charger for a phone, and a pipsqueak air engine.