This hand was designed for one of my early college projects. The goal was to create the next version of a product that existed in the real world. I chose to make a robotic hand that would be the “next version” of the hands belonging to the robots in the film Chappie. You could say that this was my first foray into robotics.
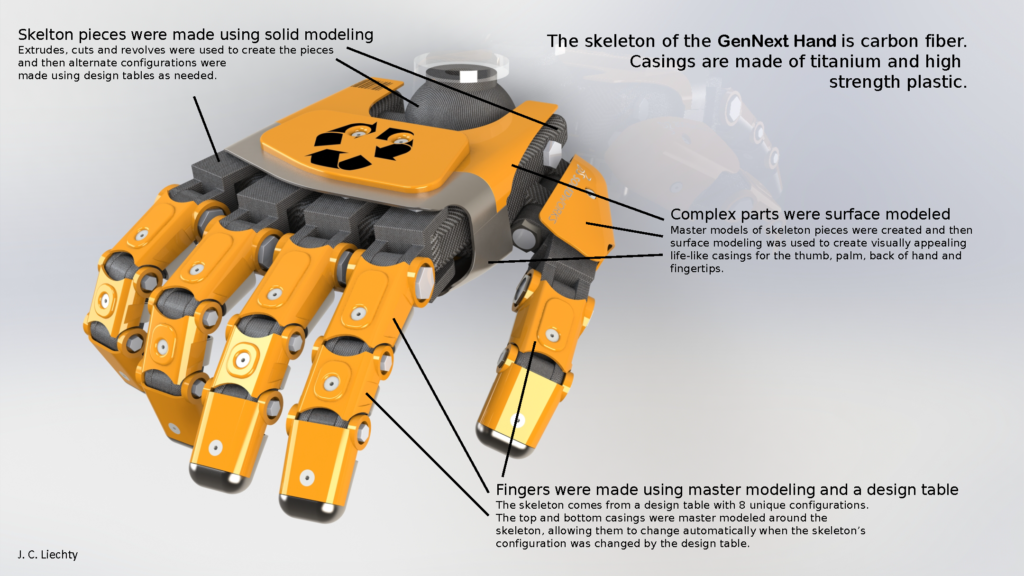
My focus in designing this hand was not on actuation methods but rather on capturing the complete range of motion of a real human hand in as simple a way as possible. I also tried to make the hand durable, light weight, and organic in appearance by creating a plastic and titanium outer shell using advanced surface modeling techniques.
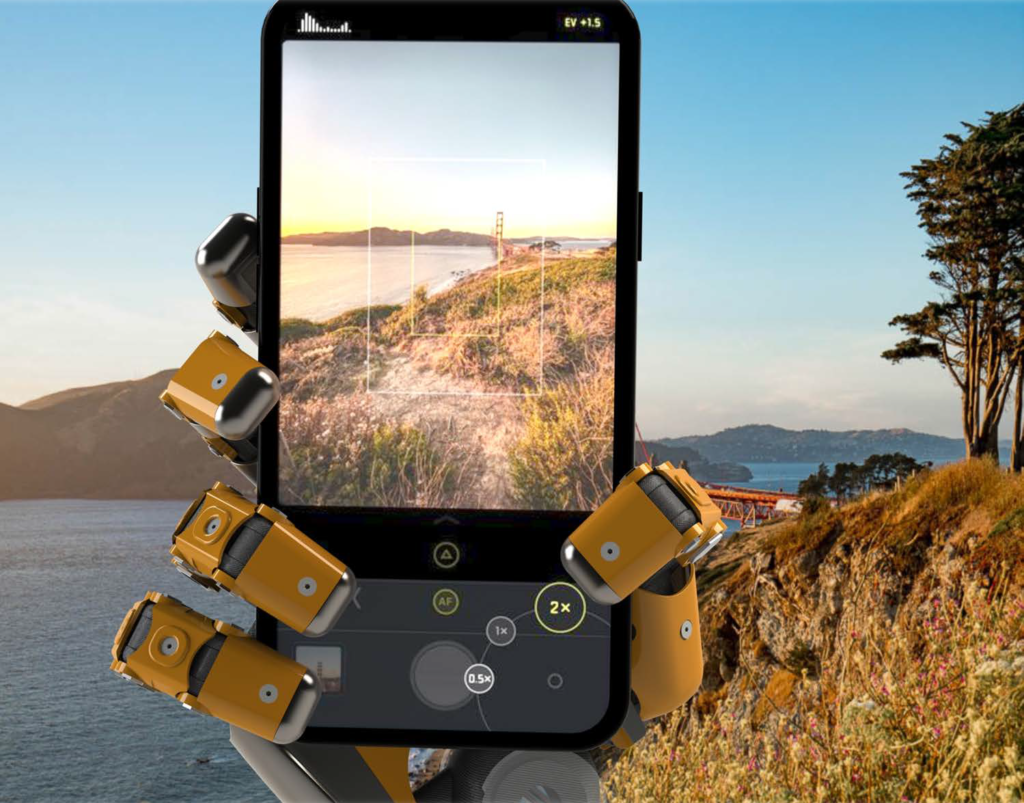
Capturing the Design Through Renders
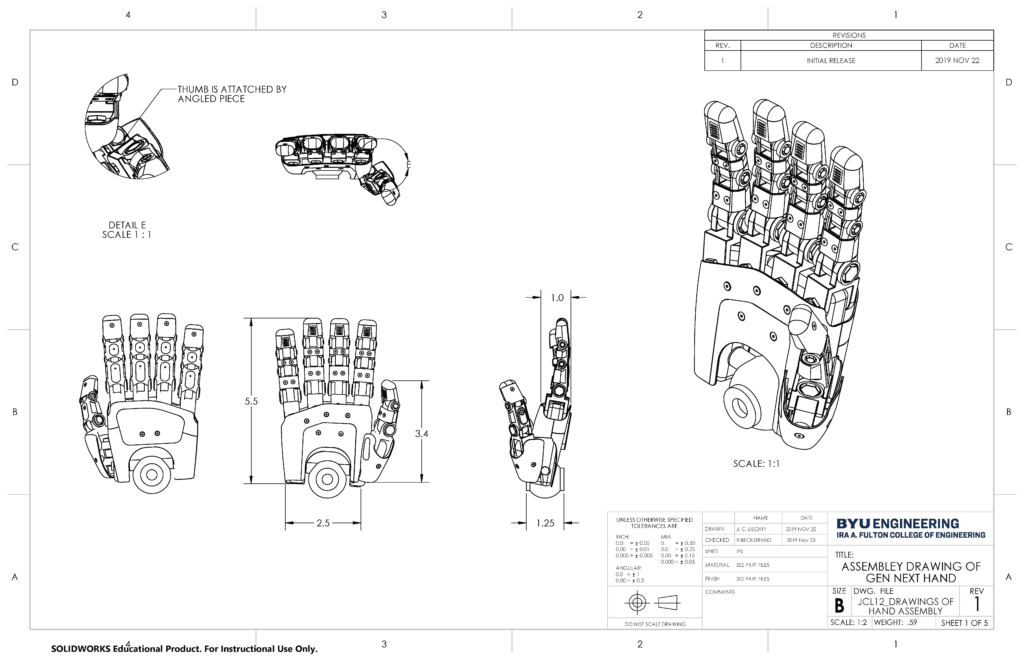
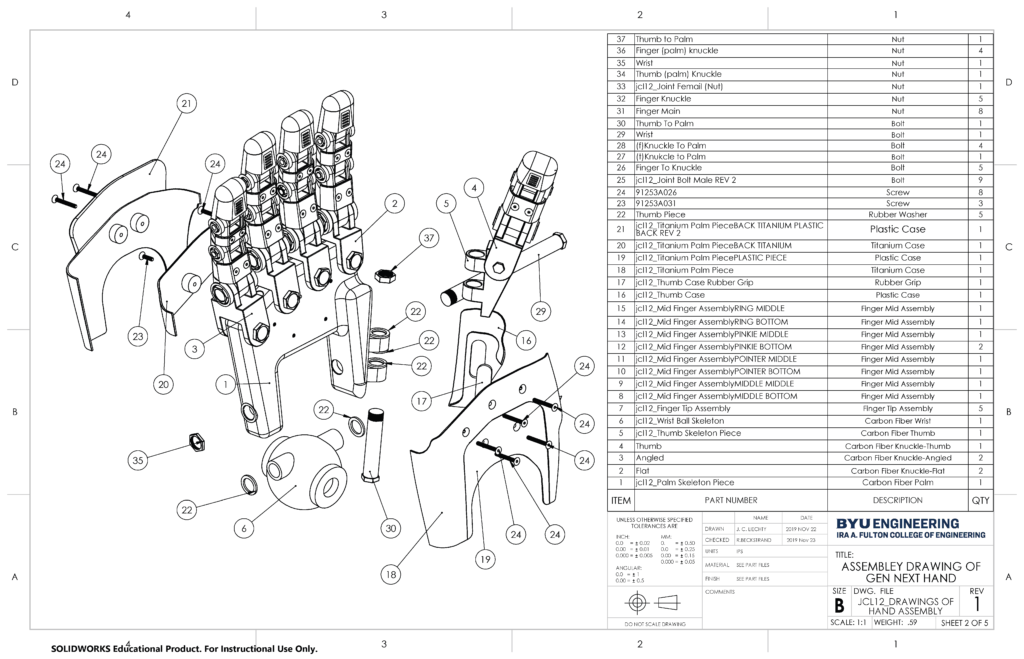
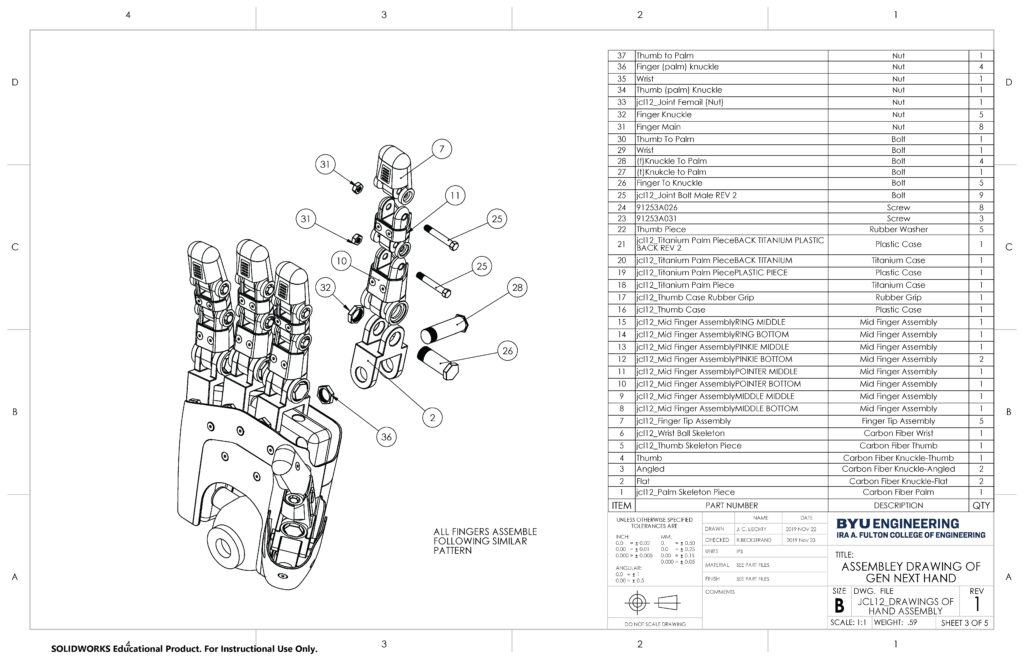
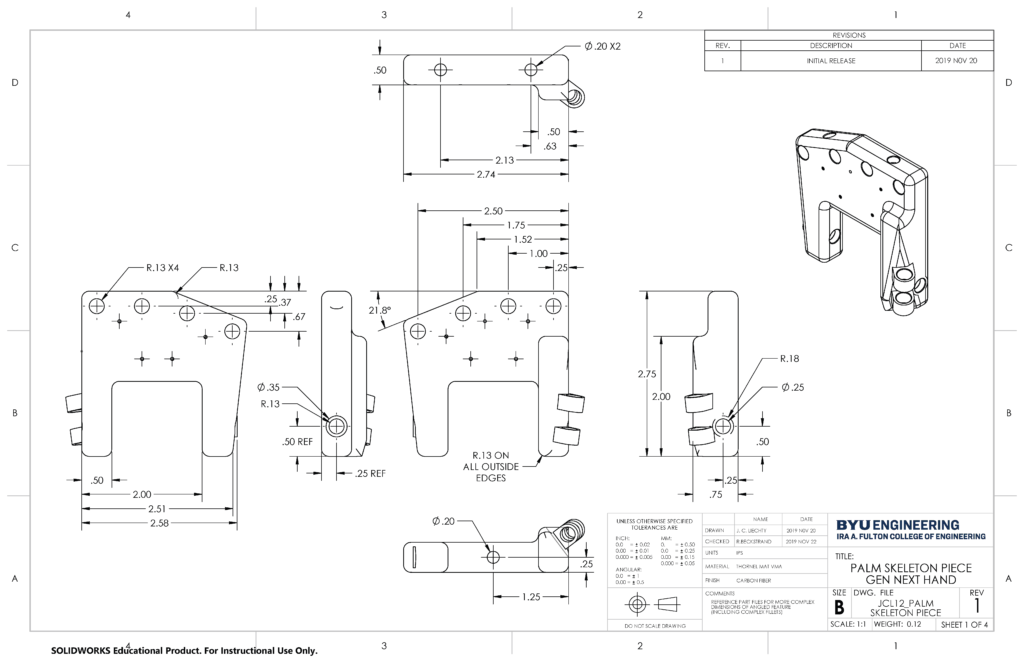
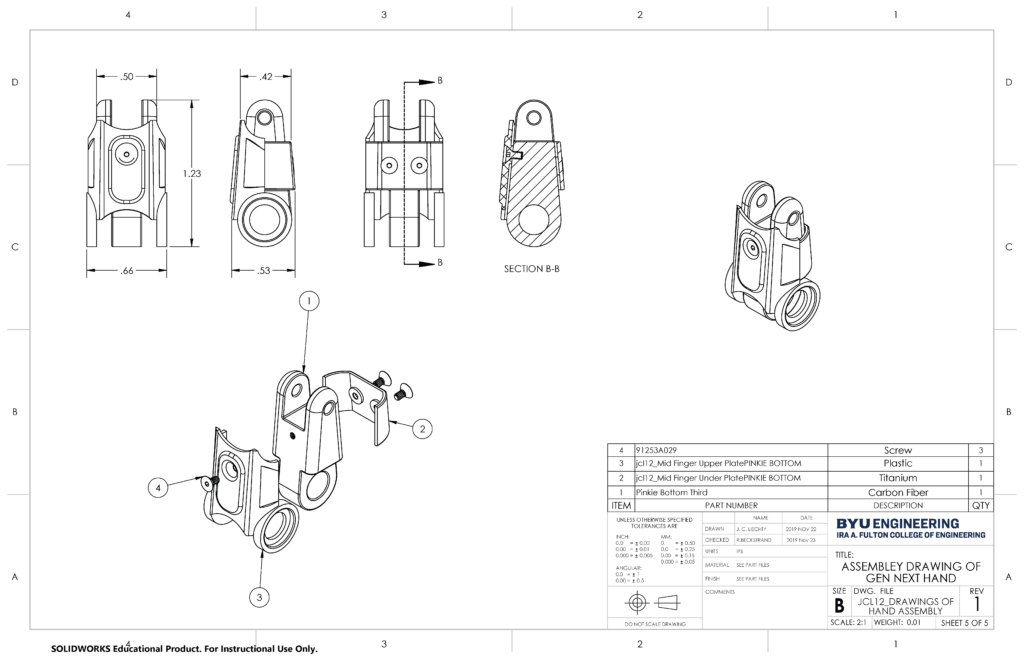
Part and Assembly Drawings
In addition to creating renderings of the hand on the computer, I also made a series of part and assembly drawings that could be used to create the hand in real life. Some of the more interesting drawings can be seen below.