Our Mars Rover may have never left planet earth, but working on this project was one of the highlights of my undergraduate career. Thanks to the ever changing rules of the University Rover Competition (URC) we had to do a lot to make our rover meet competition requirements and still perform reliably. I worked on the mechanical design team and was made some key innovations that saved our team time as we struggled to find ways to make our large rover meet the new size requirements. I created a method for folding the chassis so that it would fit within a 1m x 1m x 1m cube at competition weigh in. I also helped redesign the joints of the rover’s serial manipulator to be more light weight and precise so that we could position the end effector more accurately during competition tasks.
System Acceptance Review Videos
The system Acceptance Review (SAR) is where we show off our designs to the world. As the SAR is made in December, before many all of the new designs have been implemented, both the video for the year I was on the team (2022) and the year after (2023) feature my designs.
Rocker-Bogie Suspension Folding
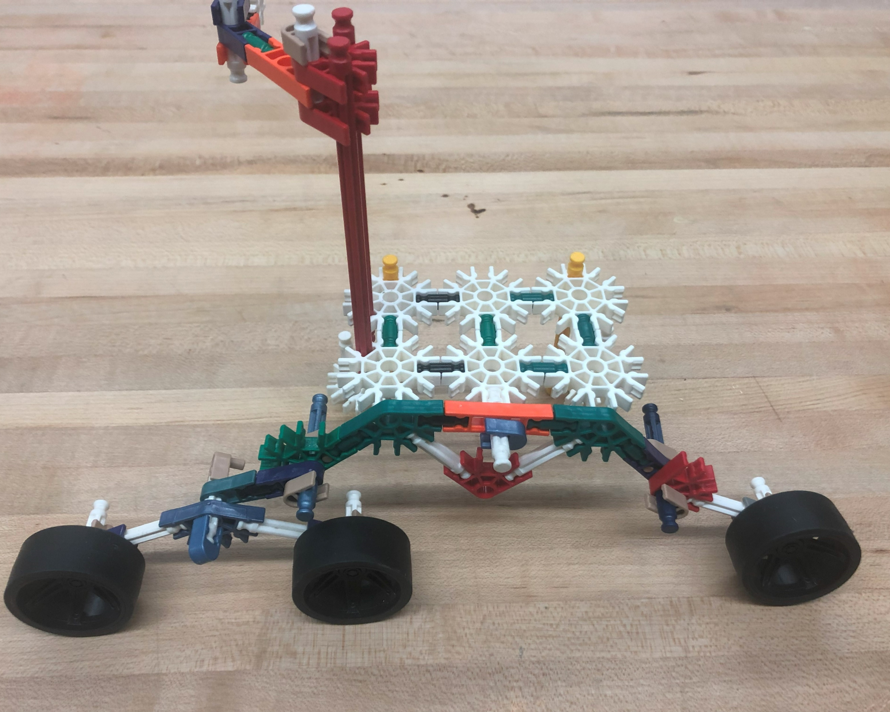
We faced a serious challenge at the beginning of the semester. New size requirements for competition weigh in meant that our current rover design was too big and a new, smaller rover would need to be built. This was a major blow because designing a new system from the ground up would have dashed our hopes finishing the project before the competition deadline. Fortunately, I had a moment of inspiration, grabbed some Kinex, and created a simple design for how we could fold the rover’s rocker-bogie suspension to meet the size requirements.
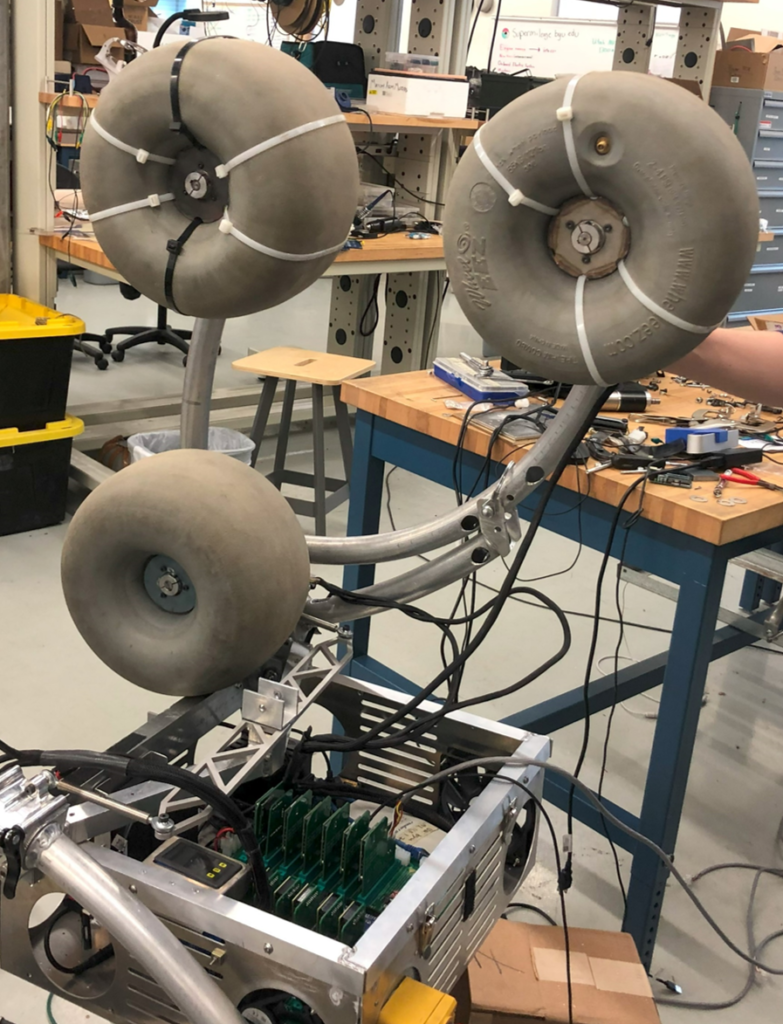
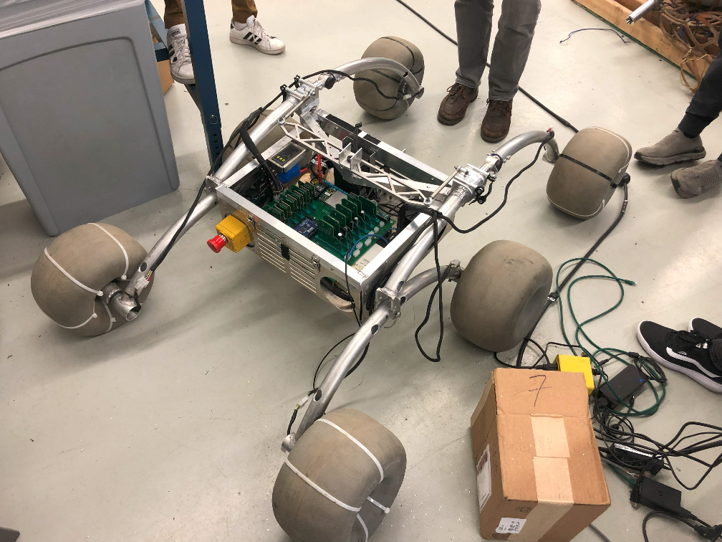
Together, the talented mechanical design team and I manufactured the parts needed to realize this design and implemented them on the rover, saving the other teams time by allowing them to continue to use their existing systems rather than having to redesign them.
Motion Planning Around Obstacles
Our rover ran on ROS, so in an effort to improve the performance of the robot manipulator in several of the tasks I worked on integrating ROS’s MoveIt motion planners with a model of our rover. The goal was to remove the need for direct human teleoperation of the manipulator and instead have the human plan a series of poses that the robot could move through to accomplish it’s task.
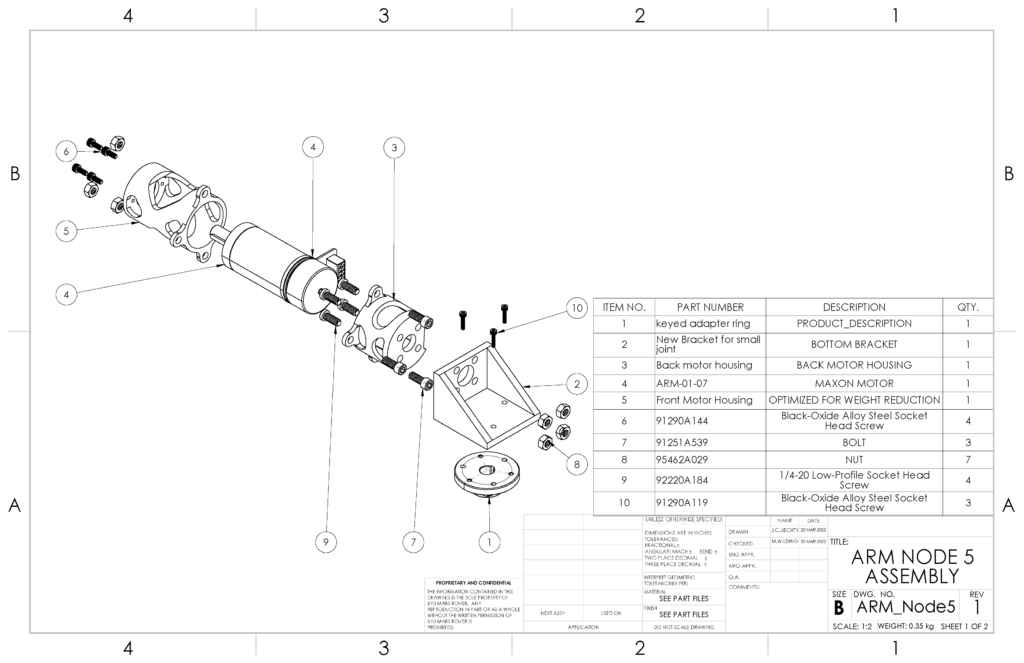
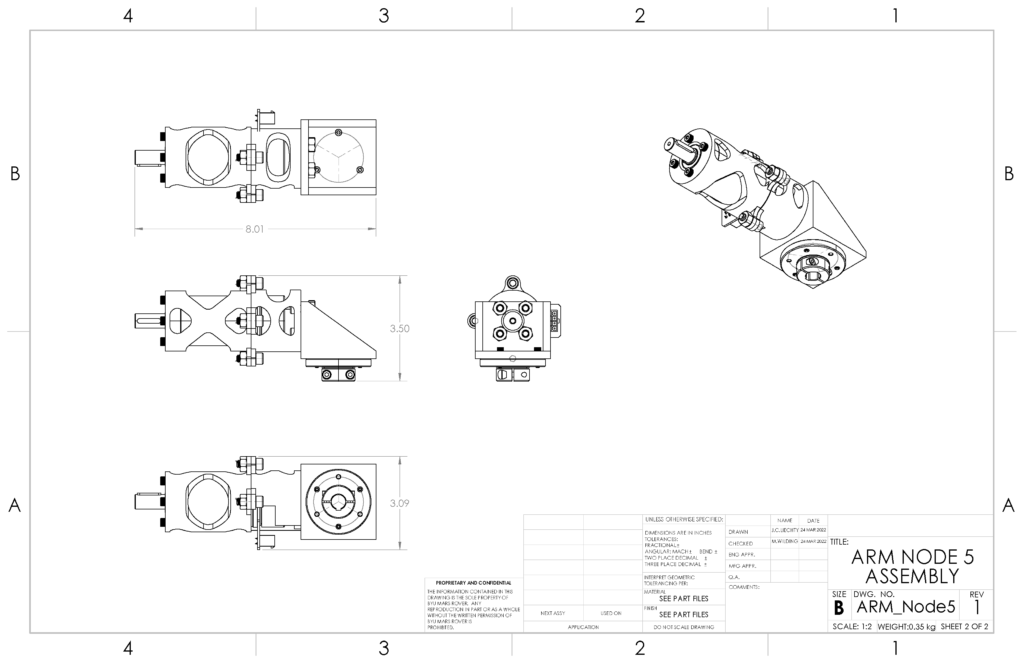
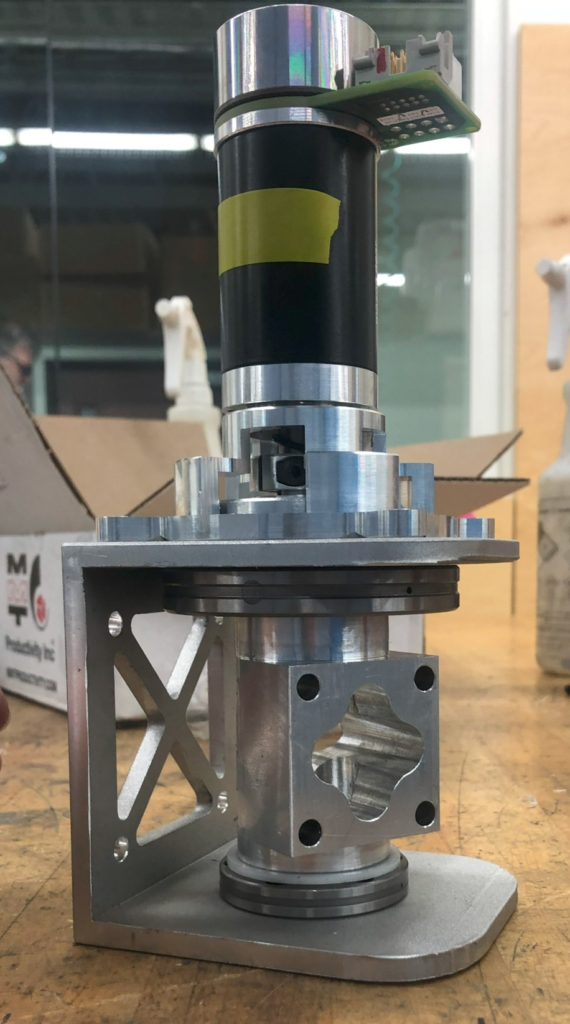
Arm Joint Redesign
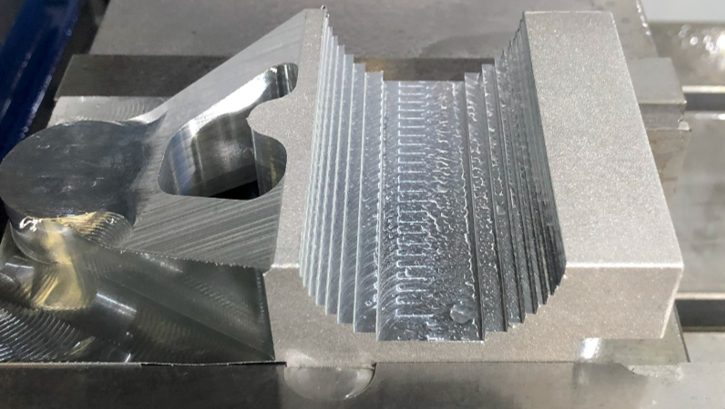
Our rover’s manipulator had joints with homemade bearings that were heavy and difficult to place precisely. Using off-the-shelf bearings and Altair’s FEA software (the same software used by Polaris to design their sleek, organic looking snowmobile chassis) we optimized our joints to maximize the strength-to-weight ratios in our typical loading conditions.